| Mechanical |
Fingers |
5 (modular, 3 active joints per finger) |
|
Degrees of Freedom (hand) |
15 DoF (actuated), 1 palm spread (coupled) |
|
Grasp Types |
Power, Pinch, Tripod, Lateral, Spherical (pre-sets) |
|
Payload (centered) |
up to 2.0 kg (typical), 3.0 kg moment-limited |
|
Max Fingertip Force |
up to 20–30 N per finger (mode-dependent) |
|
Repeatability (closure) |
±0.2 mm finger tip position (typ.) |
|
Materials |
Mg-alloy frame, polymer links, silicone tactile pads |
|
Ingress Protection |
IP40 (lab/indoor; upgrade kits available) |
|
Tooling Interface |
Quick-swap wrist plate; 4× M4 on 31–34 mm PCD |
|
Dimensions (Hand) |
≈ 185 × 120 × 65 mm (H×W×D) |
|
Mass (Hand only) |
≈ 0.9–1.1 kg |
| Electrical |
Input Voltage |
24 V DC (18–28 V acceptable) |
|
Peak / Avg Power |
120 W peak / 25–40 W typical |
|
Connectors |
Power: 2-pin; Data: RJ45 (EtherCAT) / JST (TTL) |
|
Safety |
Over-current, stall/jam detect, thermal derate |
| Control |
Control Modes |
Position, velocity, grip-force, impedance |
|
Communication |
EtherCAT (CoE), UART/TTL (115.2–1 Mbps) |
|
Latency (cmd→motion) |
≤ 5–10 ms on EtherCAT |
|
API/SDK |
C++/Python SDK, ROS/ROS2 drivers (URDF meshes) |
|
Motion Primitives |
Close/Open, Pinch/Tripod/Power, Teach & Replay |
| Sensing |
Encoders |
High-res magnetic encoders per joint |
|
Tactile |
Capacitive/pressure fingertip arrays (multi-zone) |
|
Diagnostics |
Voltage, current, temp, fault codes |
| Integration |
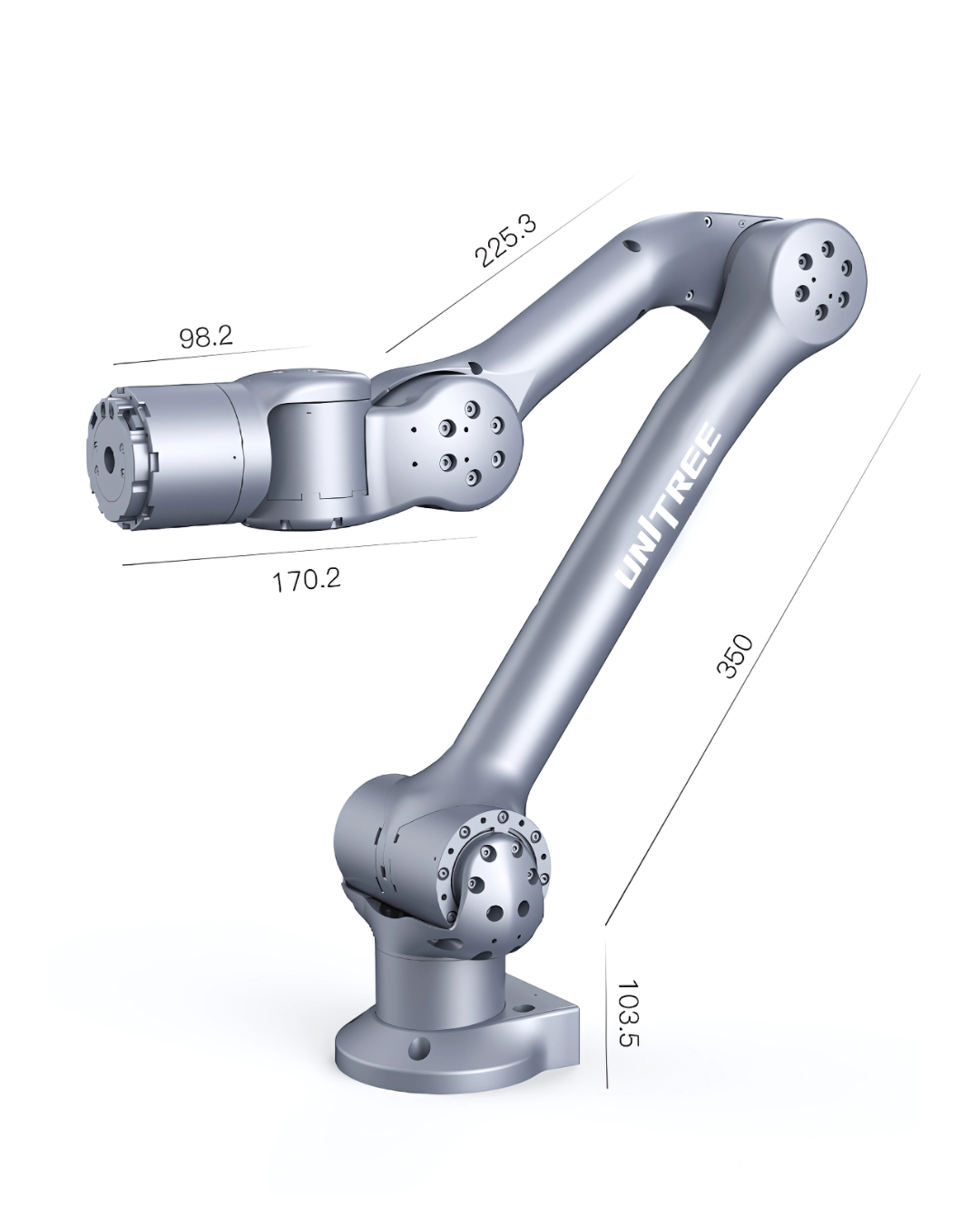
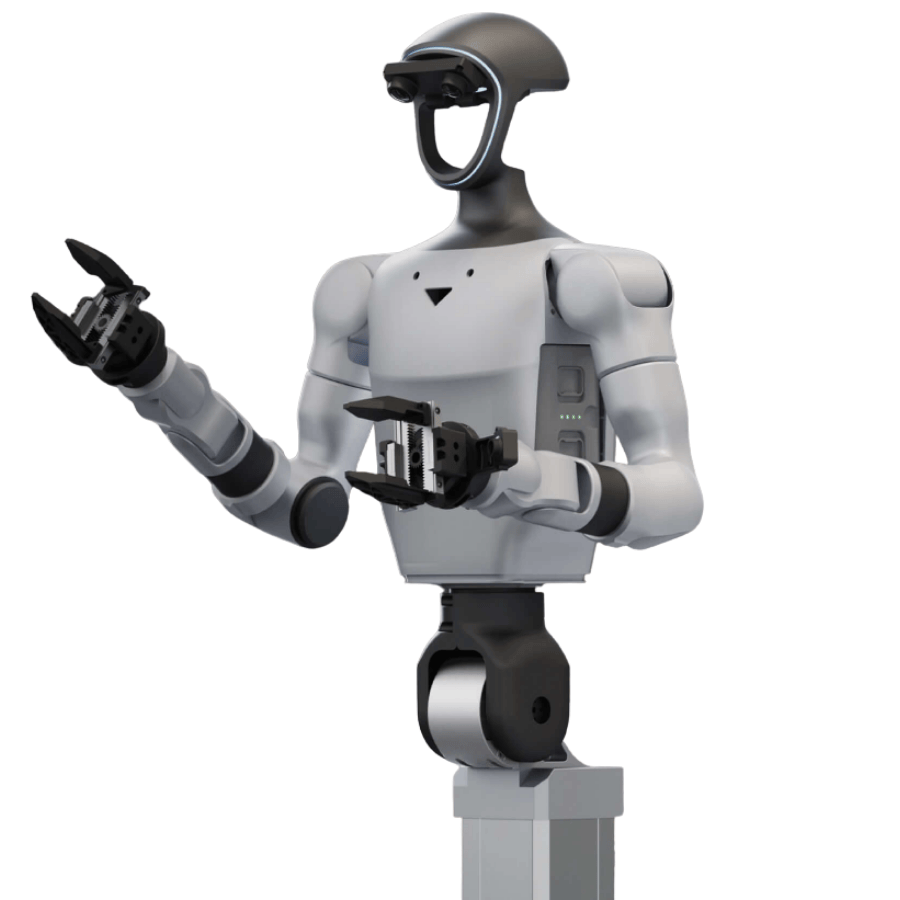
Unitree Compatibility |
H1 (humanoid hands), Z1 arm via adapter plate |
|
Mounting Time |
< 5 minutes with pre-wired harness |
|
Cable Length |
1.5 m harness (custom lengths available) |
| Environment |
Operating Temp |
0–45 °C (non-condensing) |
|
Storage Temp |
−10–60 °C |
| Package |
In the Box |
Dex5-1 hand, Unitree wrist adapter, cable set, pads kit, quick start |
































There are no reviews yet.