



Unitree Dex5-1
-
5-finger adaptive robotic hand for Unitree platforms (H1, Z1 arm mount compatible)
-
Quick-swap wrist adapter with standard bolt pattern for fast deployment
-
Multi-contact tactile fingertips for stable grasping of varied objects
-
On-board controller with low-latency EtherCAT/TTL options
-
Pre-built motion primitives: pinch, power grasp, tripod, lateral, spherical
-
Lightweight magnesium-alloy chassis; serviceable modular digits
-
Built-in over-current and jam protection; auto-home & calibration routine
- Trusted dealerDirect manufacturer partnership
- Pan-India deliveryInsured shipping, all states
- Post-sale supportTraining + service included
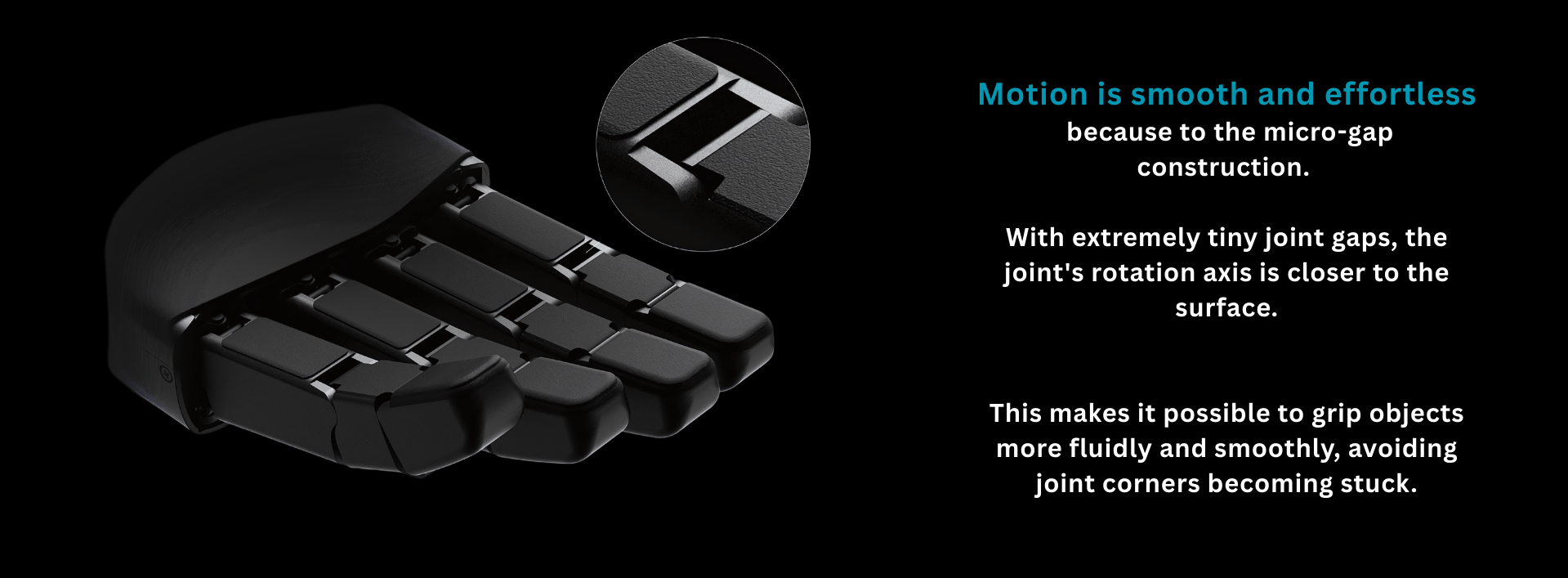
What makes it work

Product specifications
| Section | Parameter | Value |
|---|---|---|
| Mechanical | Fingers | 5 (modular, 3 active joints per finger) |
| Degrees of Freedom (hand) | 15 DoF (actuated), 1 palm spread (coupled) | |
| Grasp Types | Power, Pinch, Tripod, Lateral, Spherical (pre-sets) | |
| Payload (centered) | up to 2.0 kg (typical), 3.0 kg moment-limited | |
| Max Fingertip Force | up to 20–30 N per finger (mode-dependent) | |
| Repeatability (closure) | ±0.2 mm finger tip position (typ.) | |
| Materials | Mg-alloy frame, polymer links, silicone tactile pads | |
| Ingress Protection | IP40 (lab/indoor; upgrade kits available) | |
| Tooling Interface | Quick-swap wrist plate; 4× M4 on 31–34 mm PCD | |
| Dimensions (Hand) | ≈ 185 × 120 × 65 mm (H×W×D) | |
| Mass (Hand only) | ≈ 0.9–1.1 kg | |
| Electrical | Input Voltage | 24 V DC (18–28 V acceptable) |
| Peak / Avg Power | 120 W peak / 25–40 W typical | |
| Connectors | Power: 2-pin; Data: RJ45 (EtherCAT) / JST (TTL) | |
| Safety | Over-current, stall/jam detect, thermal derate | |
| Control | Control Modes | Position, velocity, grip-force, impedance |
| Communication | EtherCAT (CoE), UART/TTL (115.2–1 Mbps) | |
| Latency (cmd→motion) | ≤ 5–10 ms on EtherCAT | |
| API/SDK | C++/Python SDK, ROS/ROS2 drivers (URDF meshes) | |
| Motion Primitives | Close/Open, Pinch/Tripod/Power, Teach & Replay | |
| Sensing | Encoders | High-res magnetic encoders per joint |
| Tactile | Capacitive/pressure fingertip arrays (multi-zone) | |
| Diagnostics | Voltage, current, temp, fault codes | |
| Integration | Unitree Compatibility | H1 (humanoid hands), Z1 arm via adapter plate |
| Mounting Time | < 5 minutes with pre-wired harness | |
| Cable Length | 1.5 m harness (custom lengths available) | |
| Environment | Operating Temp | 0–45 °C (non-condensing) |
| Storage Temp | −10–60 °C | |
| Package | In the Box | Dex5-1 hand, Unitree wrist adapter, cable set, pads kit, quick start |







There are no reviews yet.