





QIR1975T Dual IR Thermal Sensors Object Tracking Gimbal Camera
-
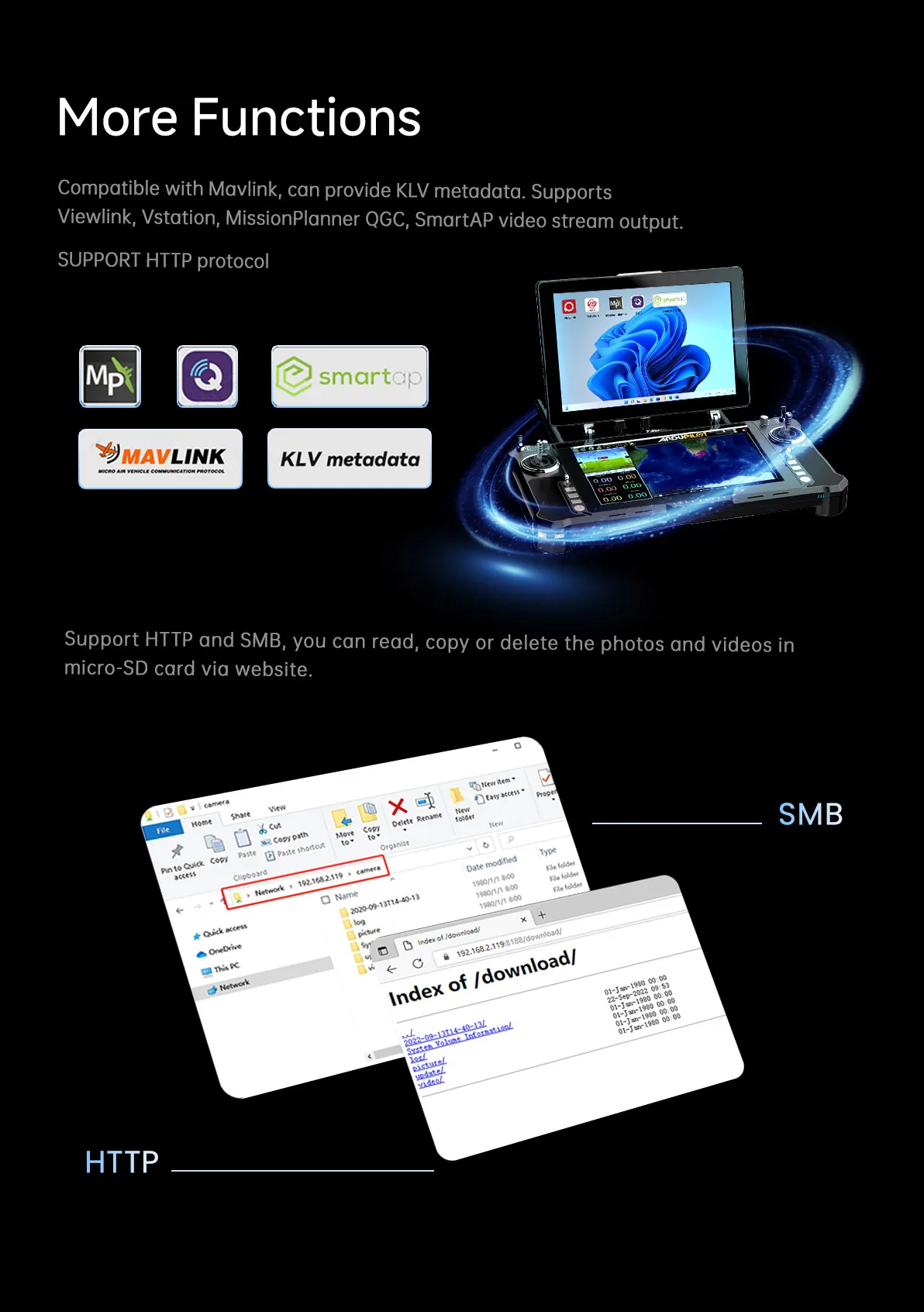
Dual-IR thermal sensors on a single 3-axis gimbal for object tracking applications
-
Two separate uncooled long-wave infrared imagers (8 µm–14 µm), one with a 75 mm lens and one with a 19 mm lens, enabling long-range detection plus wider-field surveillance.
-
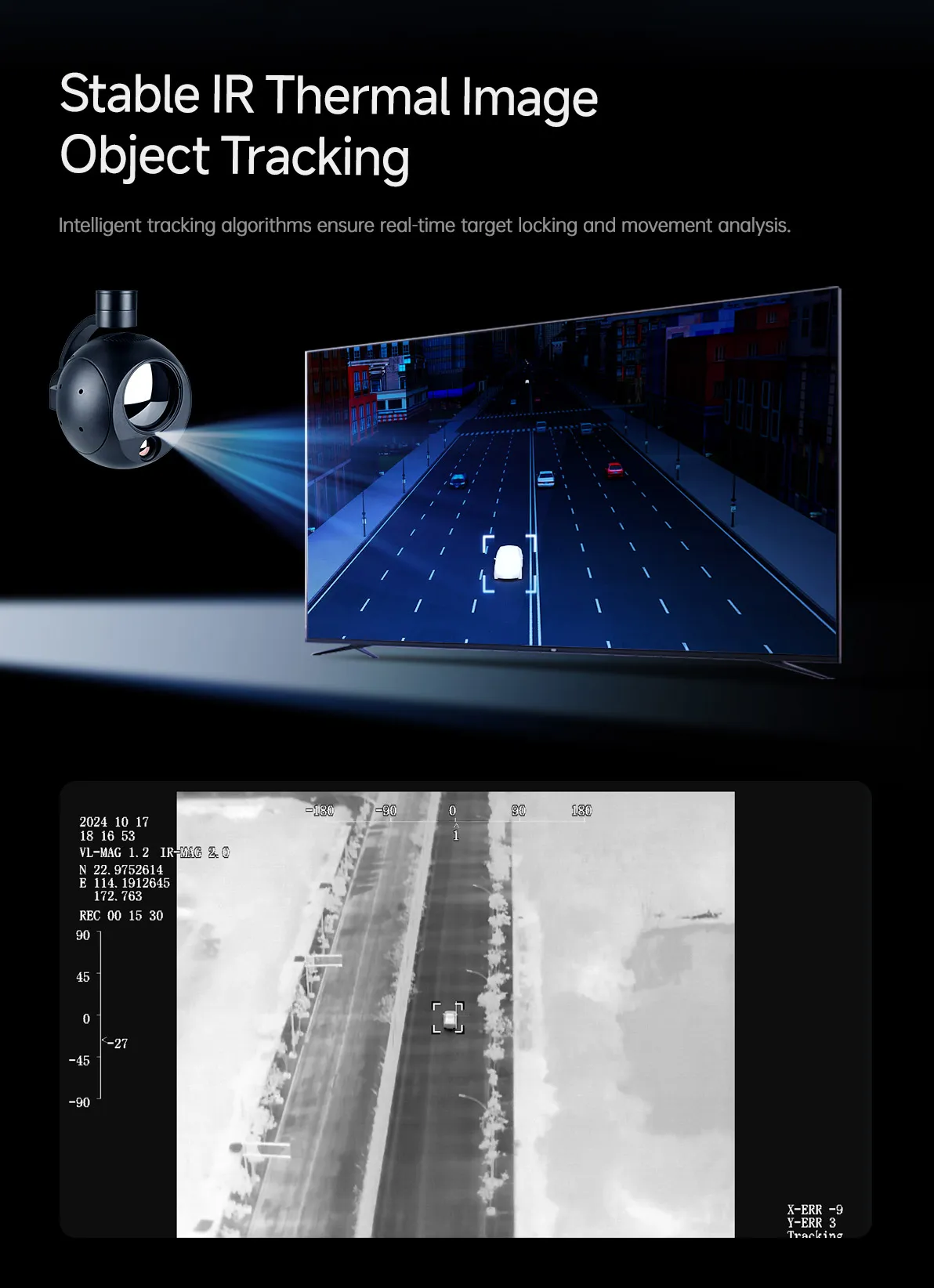
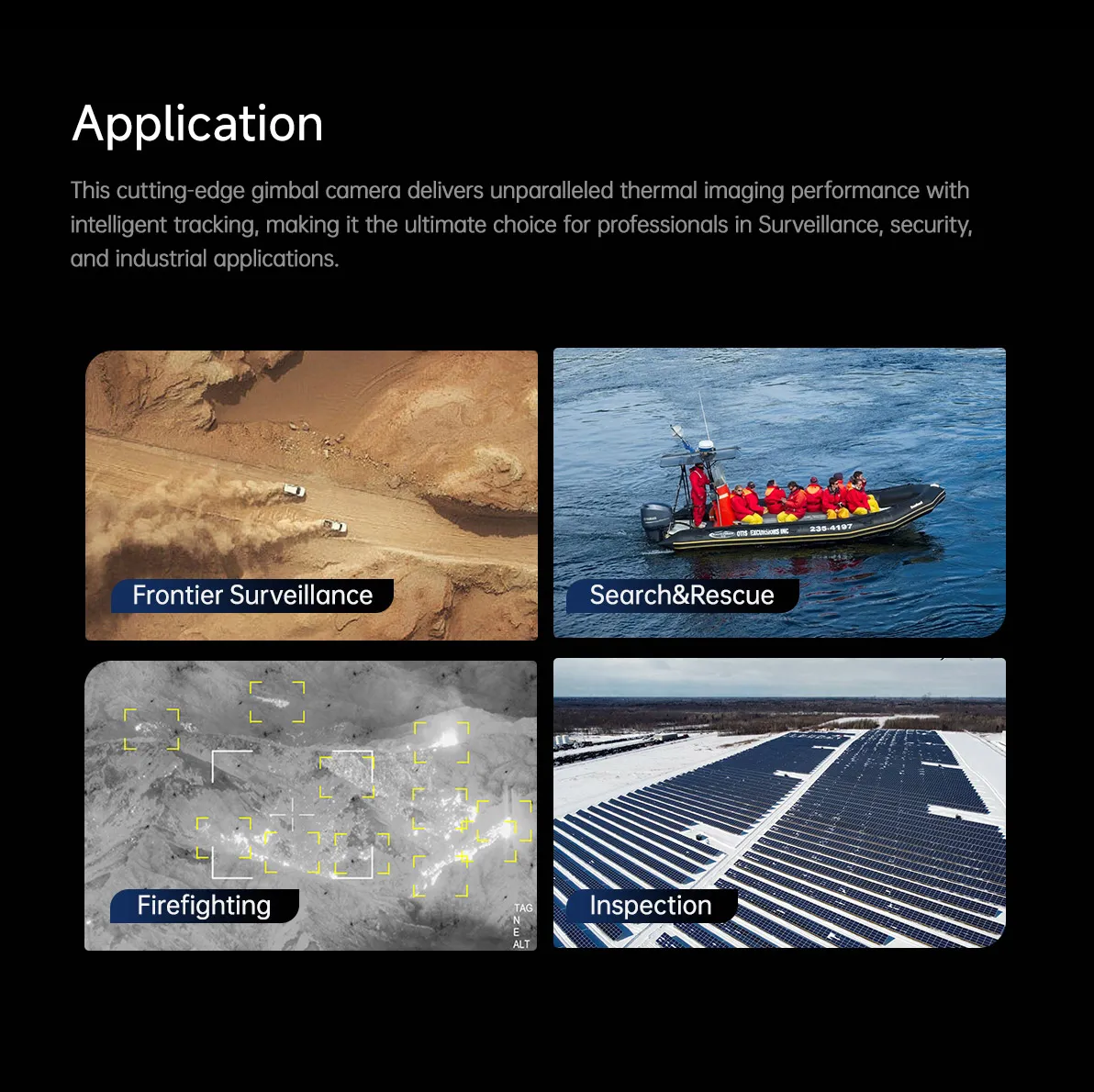
Built-in object tracking algorithm: supports deviation update at 50 Hz, tracking minimum object size, memory time for object persistence, suitable for UAV, security and defense payloads.
-
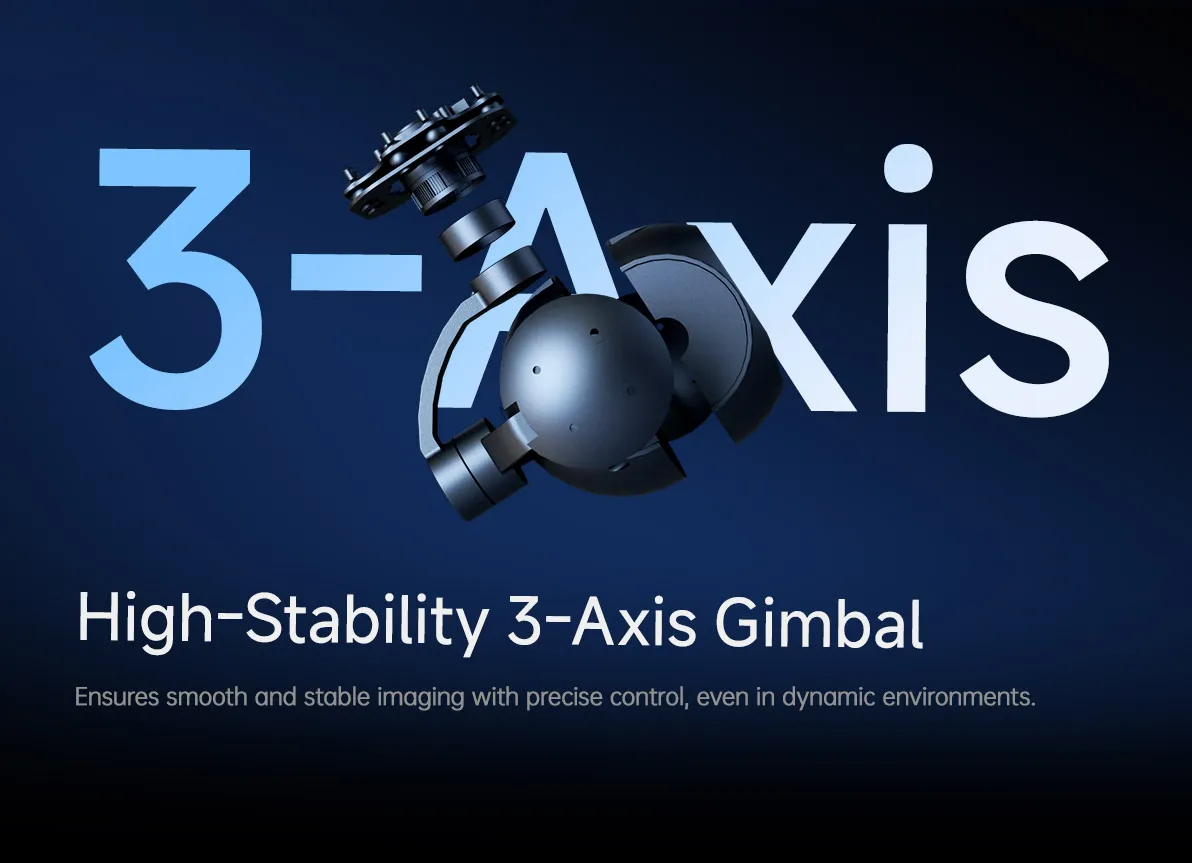
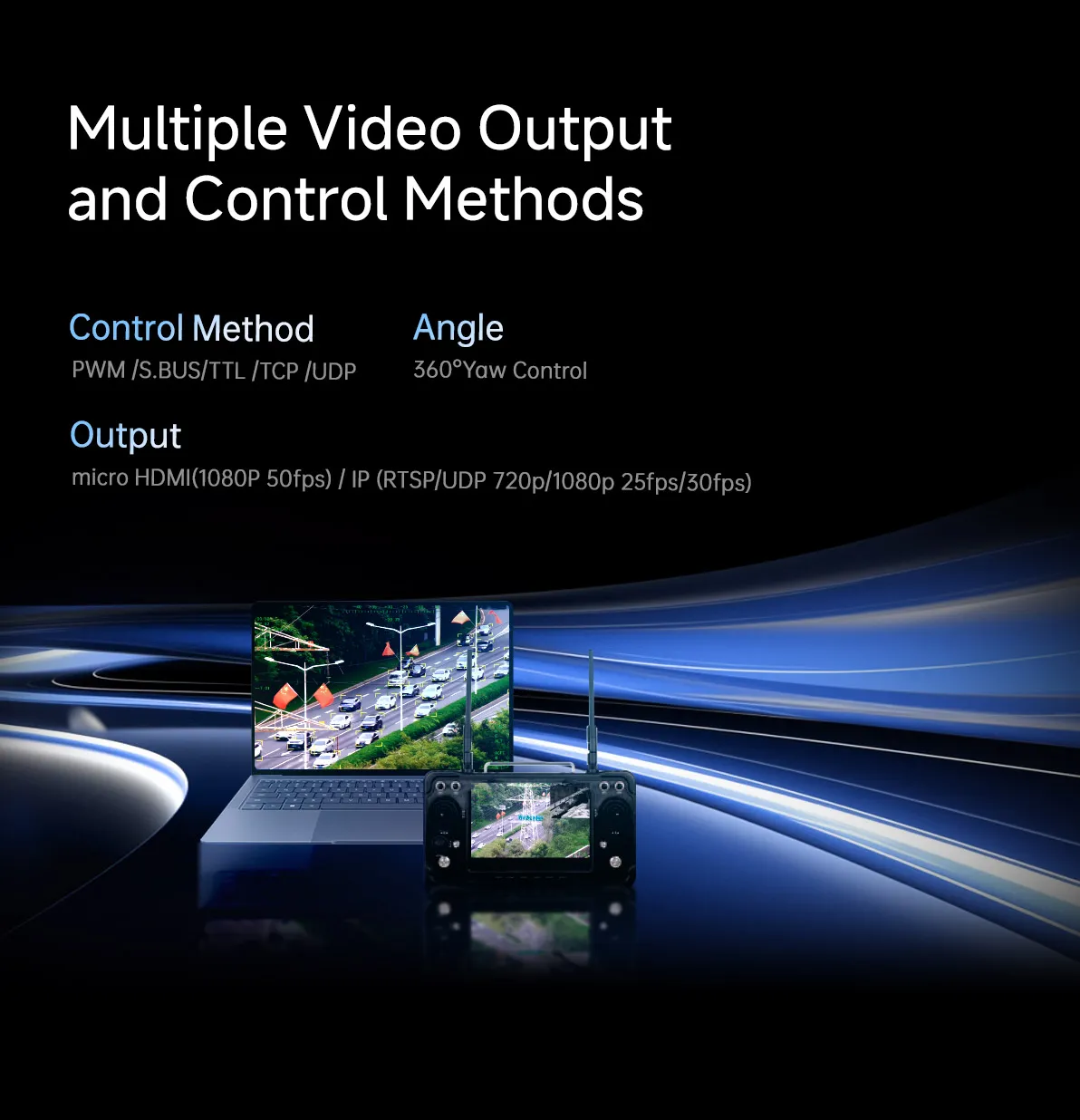
Gimbal stabilization and control features: pitch/tilt, yaw/pan motion, ±70° roll, smooth motion, one-key centering, supports many control interfaces (PWM, TTL, SBUS, TCP/UDP).
-
Multiple output formats including micro-HDMI (1080p50) or IP streaming (720p/1080p) and local TF-card recording up to 512 GB. Designed for integration in UAV and ground systems.
- Trusted dealerDirect manufacturer partnership
- Pan-India deliveryInsured shipping, all states
- Post-sale supportTraining + service included
What makes it work
Overview
| Category | Specification |
|---|---|
| Working voltage / Input | 16 V nominal; input 4S–6S (14.8V–25.2V) |
| Output voltage | 5 V (connect with PWM) |
| Dynamic current | 430 mA to 1,250 mA @ 16 V |
| Power consumption | Average ~6.9 W, max up to ~20 W |
| Operating environment | –20 °C to +50 °C |
| Video/Output formats | Micro HDMI (1080p@50fps) or IP (RTSP/UDP 720p or 1080p 25/30fps) |
| Local storage | TF card support up to 512 GB (Class 10, FAT32) |
| Image & video formats | JPG (1920×1080) for stills; MP4 (1080p@30fps) for video |
| Control methods | PWM / TTL / S.BUS / TCP / UDP |
| Gimbal mechanical range | Pitch/Tilt: –55° (Up) to 125° (Down); Roll: ±70°; Yaw/Pan: ±300° (or ±360° “N” version) |
| Gimbal controllable range | Pitch/Tilt: –45° to 120°; Yaw/Pan: ±290° (or ±360° N version) |
| Gimbal vibration angle | Pitch/Roll/Yaw: ±0.02° |
| Gimbal one-key centre | Yes |
| Thermal Imager A (75 mm lens) | Focal length: 75 mm; Horizontal FOV: 5.9°; Vertical FOV: 4.7°; Diagonal FOV: 7.5° |
| Detector pixel: 640×512; Pixel pitch: 12 µm; Working mode: Uncooled LWIR (8–14 µm) | |
| Detective distance (Man, 1.8×0.5 m): 3,125 m; Recognize: 781 m; Verify: 391 m | |
| Detective distance (Car, 4.2×1.8 m): 9,583 m; Recognize: 2,396 m; Verify: 1,198 m | |
| NETD ≤ 50 mK (@25 °C); MRTD ≤650 mK (@characteristic frequency) | |
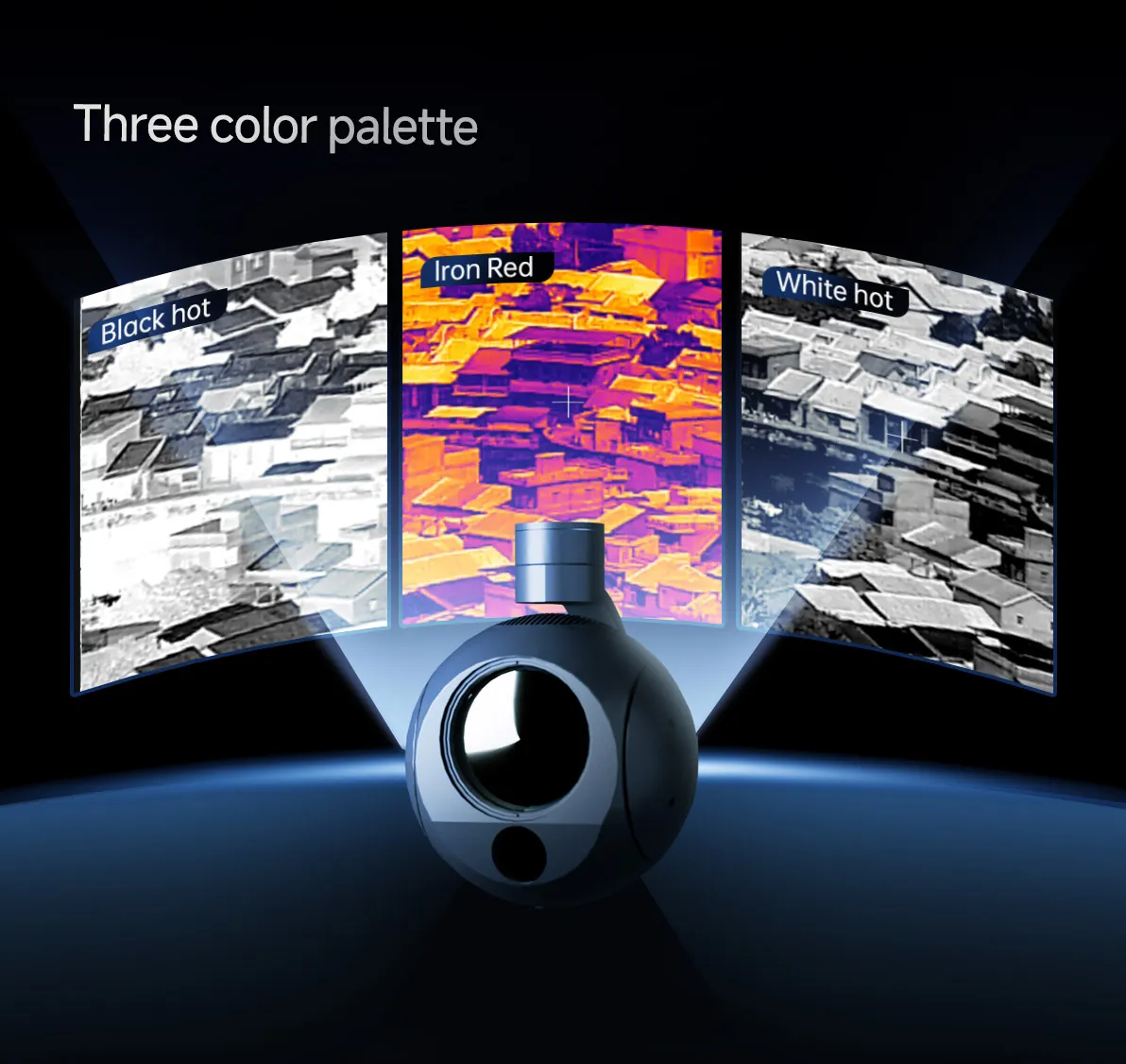
| Color palettes: White hot / Black hot / Pseudo colour; Auto non-uniform correction (no shutter) | |
| Thermal Imager B (19 mm lens) | Focal length: 19 mm; Horizontal FOV: 24.1°; Vertical FOV: 19.4°; Diagonal FOV: 30.6° |
| Detector pixel: 640×512; Pixel pitch: 12 µm; Working mode: Uncooled LWIR (8–14 µm) | |
| Detective distance (Man): 750 m; Recognize: 188 m; Verify: 94 m | |
| Detective distance (Car): 2,300 m; Recognize: 575 m; Verify: 288 m | |
| Same imaging features: NETD ≤50 mK; same palette & correction features | |
| Object Tracking Specifications | Update rate of deviation pixel: 50 Hz |
| Output delay of deviation pixel: 5 ms | |
| Minimum object contrast: 5% | |
| SNR: 4 | |
| Minimum object size: 32×32 pixels; Maximum object size: 128×128 pixels | |
| Tracking speed: ±48 pixels/frame | |
| Object memory time: 100 frames (~4 s) | |
| Other Features | OSD overlay: yaw/pitch angle, magnification, card recording duration, GPS/altitude, date & time |
| Geotagging: GPS coordinates embedded in photo EXIF | |
| Card reading online: SMB / HTTP; supports KLV metadata output via UDP; supports ArduPilot / PX4 (MAVLink protocol) | |
| Physical & Packaging | Net weight: 1,250 ±10 g (viewport version with viewport) |
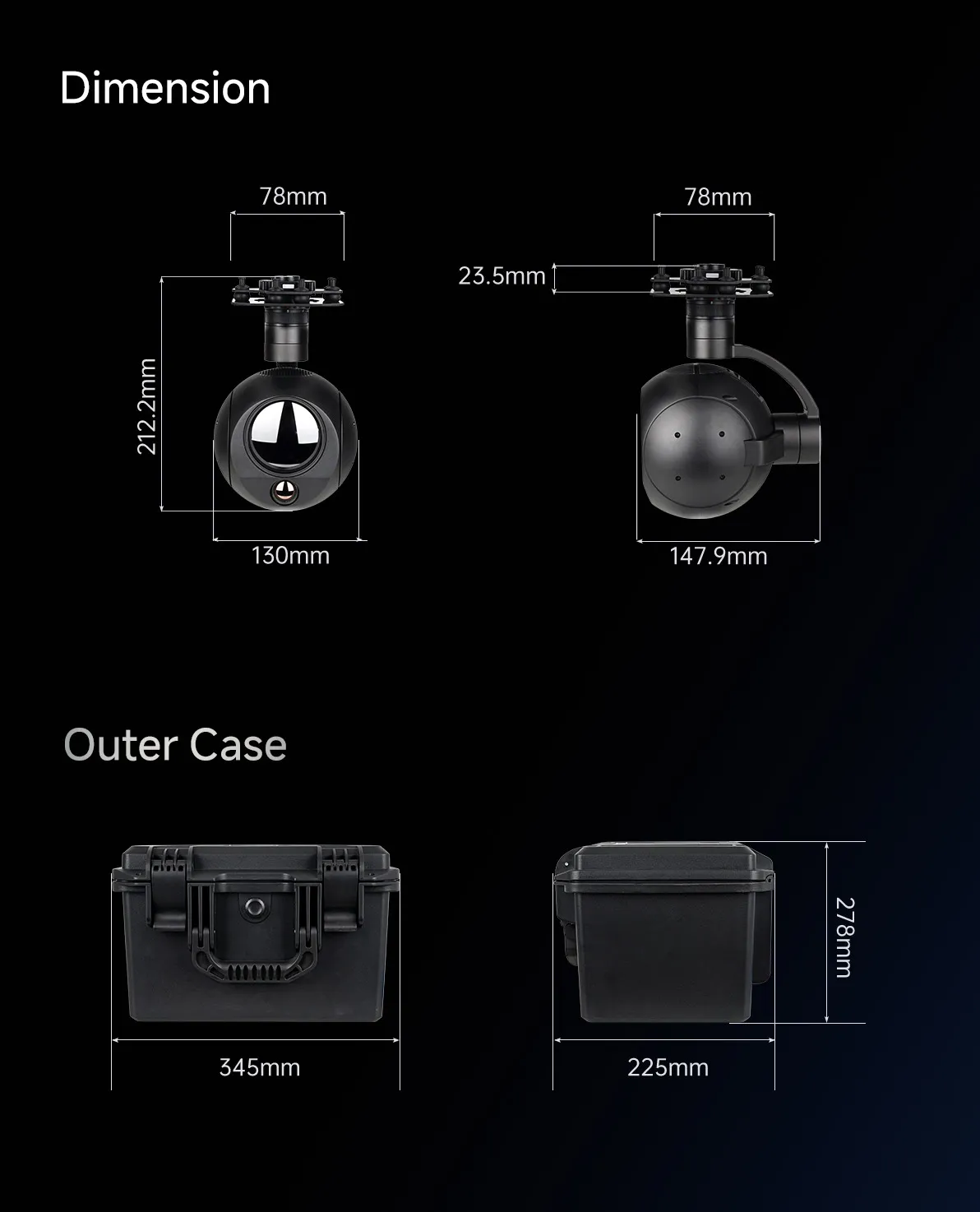
| Product dimensions: 147.9 × 130 × 203.2 mm (147.9 × 130 × 212.2 mm with viewport) | |
| Gross weight approx: 2,977 g; Package size: 350 × 300 × 250 mm | |
| Accessories | Gimbal camera unit, screws, aluminium cylinders, damping balls, USB-to-TTL cable, high-quality plastic box with foam cushion |














There are no reviews yet.