



JetAuto Standard Kit – With Jetson Nano (4GB)
- NVIDIA Jetson Nano (4GB) + ROS1/ROS2 – High-performance Jetson Nano 4GB controller with TensorRT acceleration; compatible with both ROS1 and ROS2 for SLAM, deep learning, and AI vision projects.
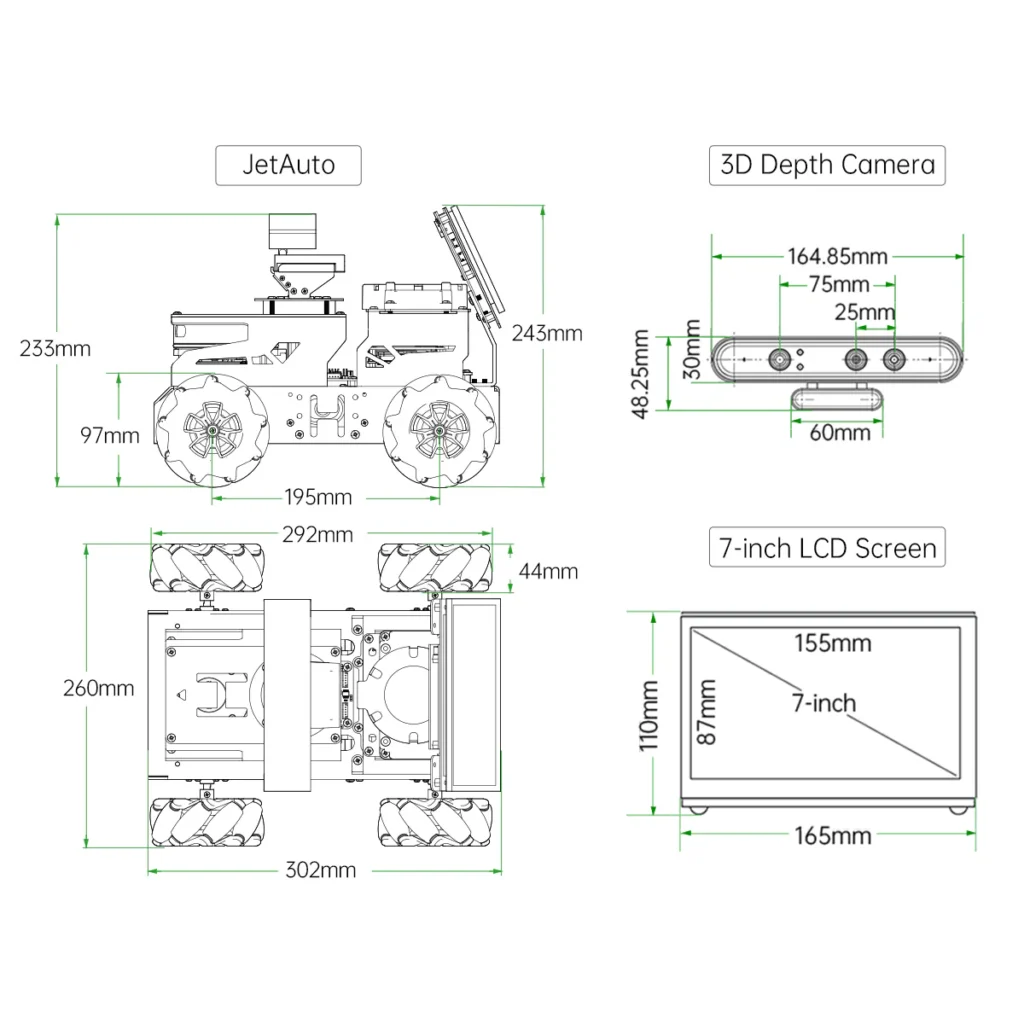
- 3D Depth Camera + Lidar (SLAM Mapping) – Equipped with a 3D depth camera and SLAMTEC A1 Lidar; supports Gmapping, Hector, Karto, Cartographer, and RRT algorithms for multi-point navigation, TEB path planning, and RTAB 3D mapping.
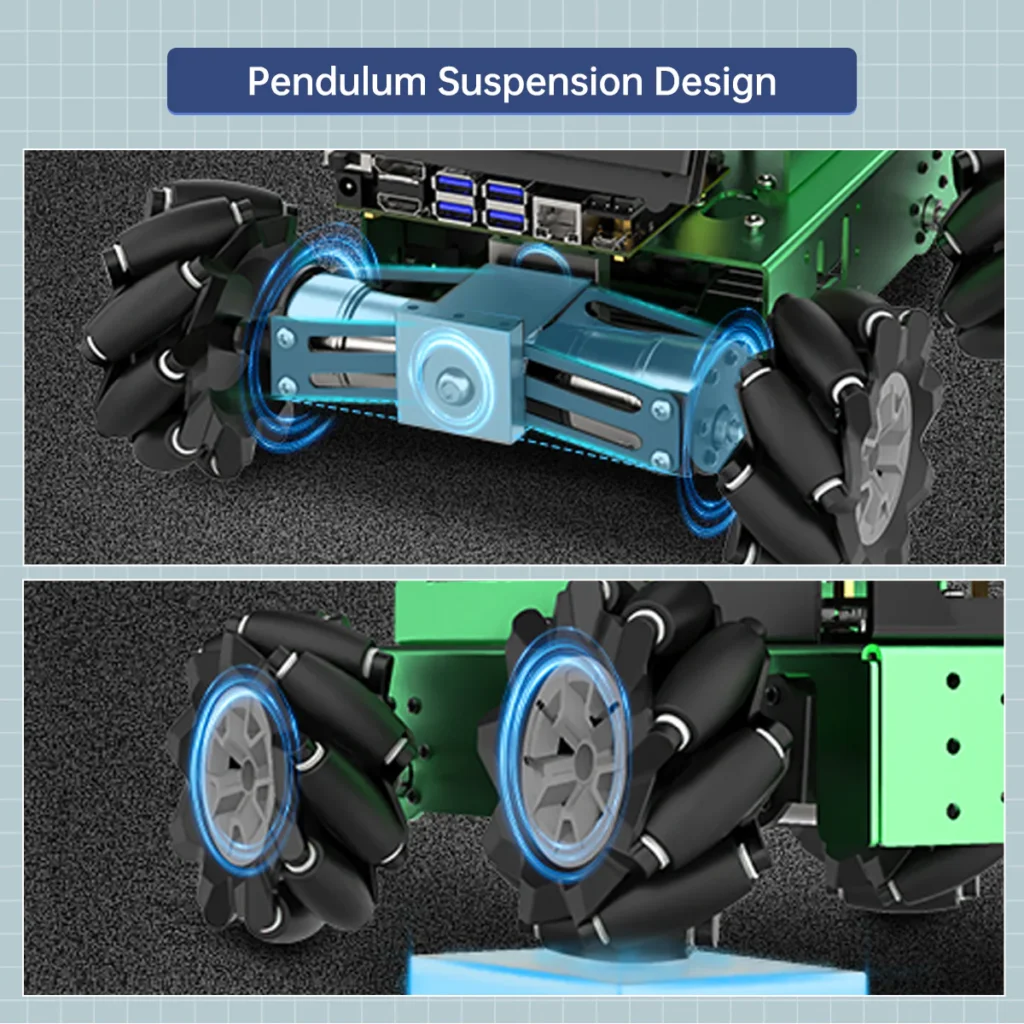
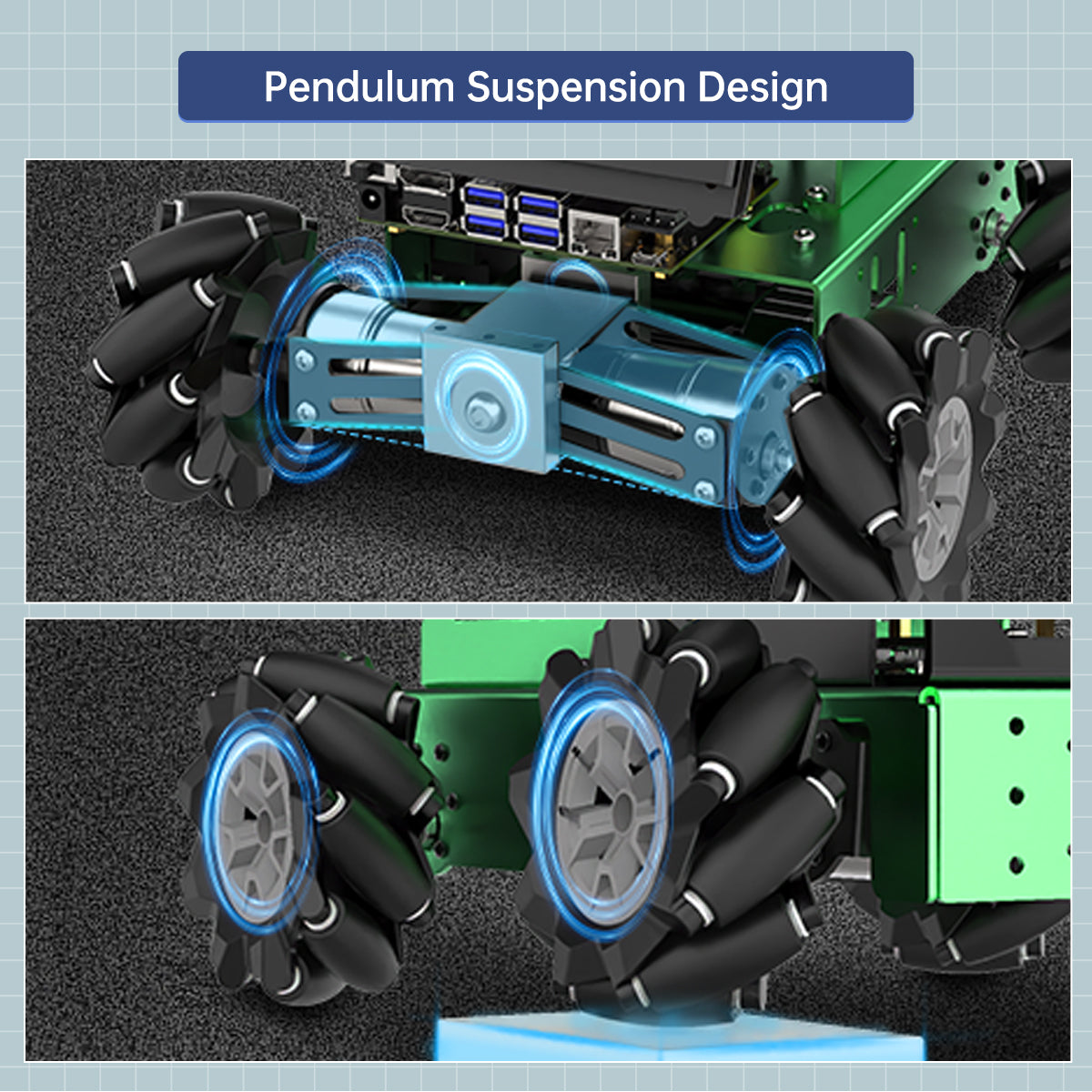
- 360° Omnidirectional Mecanum Wheel Suspension Chassis – Four precision Mecanum wheels with hall encoder motors for forward, horizontal, diagonal, and rotational movement with high-precision odometry feedback.
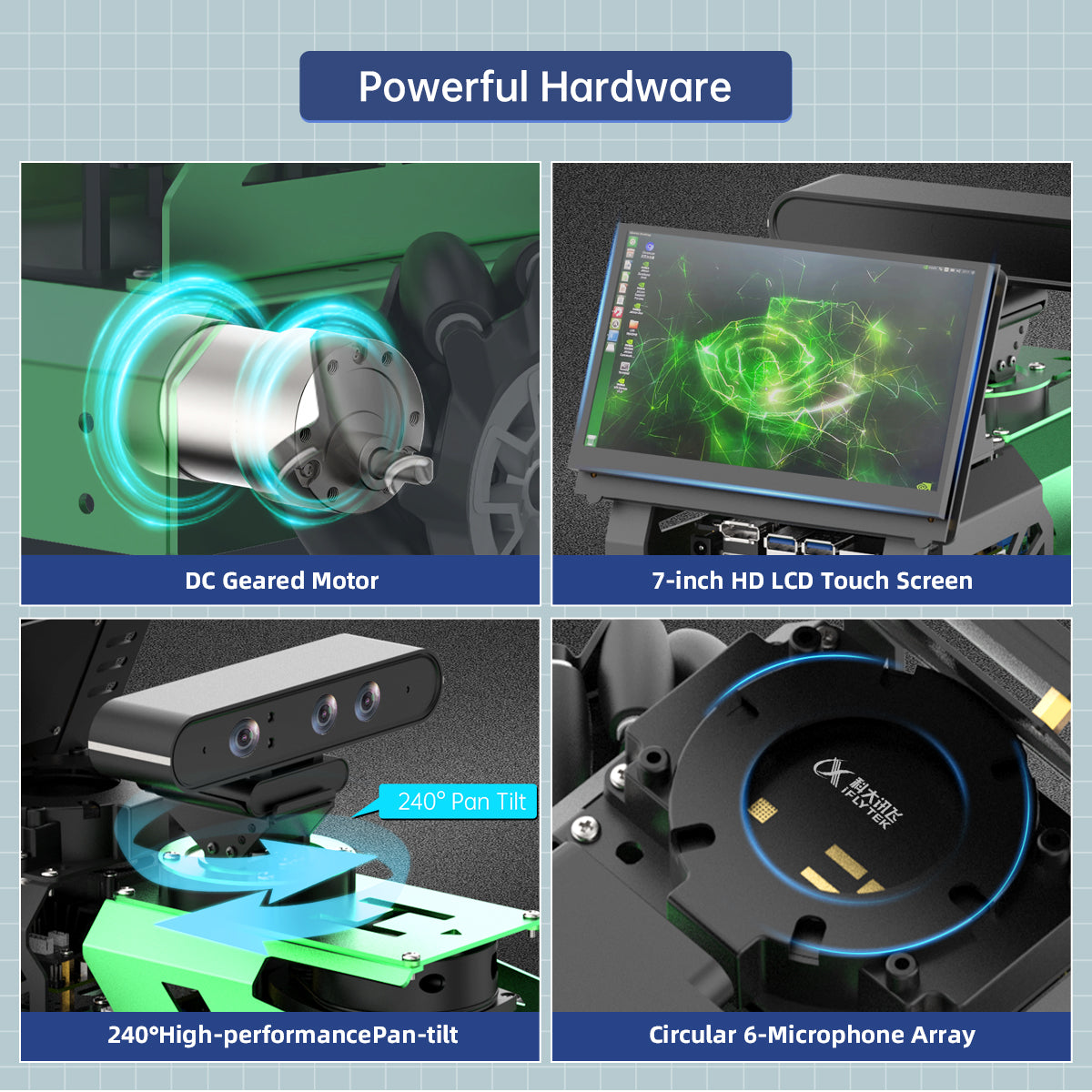
- 7-Inch HD Display (1024×600) – Built-in 7-inch screen compatible with NVIDIA Jetson Nano for real-time robot parameter monitoring, debug visualization, and RViz/Gazebo simulation display.
- AI Vision & Deep Learning – Supports MediaPipe, YOLO model training, KCF target tracking, color recognition, April Tag tracking, autonomous driving, human feature recognition, and somatosensory interaction.
- 3 months · ₹36,441
- 6 months · ₹18,221
- 9 months · ₹12,147
Select Snapmint at checkout · Available on orders above ₹3,000 · Subject to eligibility
- Trusted dealerDirect manufacturer partnership
- Pan-India deliveryInsured shipping, all states
- Post-sale supportTraining + service included
What makes it work
JetAuto Standard Kit
NVIDIA Jetson Nano 4GB
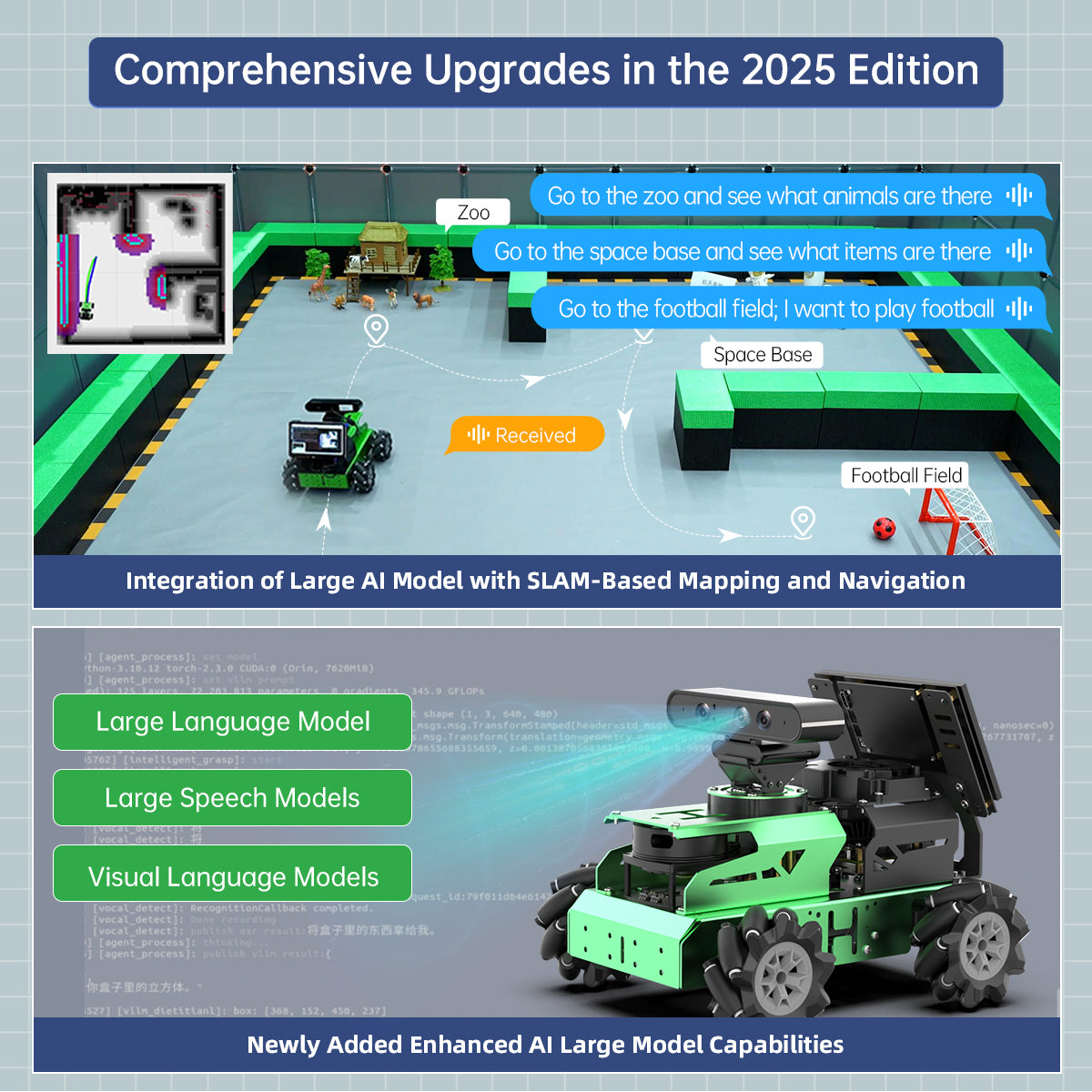
JetAuto is a high-performance AI robot car tailored for ROS-based education. Equipped with a Mecanum-wheel suspension chassis, NVIDIA Jetson Nano controller, Lidar, 3D depth camera, and HD display, it delivers robust functionalities including motion control, mapping and navigation, path planning, tracking and obstacle avoidance, autonomous driving, human feature recognition, and voice interaction. JetAuto also deploys a Multimodal Large AI Model to support more advanced embodied AI applications.
- ✅ Driven by AI, powered by Jetson Nano 4GB — ROS1 + ROS2 compatible, both system images provided
- ✅ Mecanum-wheel suspension chassis — 360° omnidirectional movement, superior terrain adaptability for SLAM
- ✅ SLAMTEC A1 360° Lidar — 2D SLAM mapping with 5 algorithms: Gmapping, Hector, Karto, Cartographer, RRT
- ✅ 3D depth camera — RTAB 3D mapping, point cloud images, depth obstacle avoidance
- ✅ ChatGPT multimodal AI — 3D vision + 6-microphone array: far-field voice + scene understanding + physical action
- ✅ YOLOv8 object detection · MediaPipe human body recognition · KCF target tracking · Somatosensory control
- ✅ TEB path planning · Dynamic obstacle avoidance · Multi-point autonomous navigation · RRT autonomous exploration
- ✅ 7-inch IPS touch screen (1024×600) robot-mounted · 2DOF pan-tilt camera · 11.1V 6000mAh LiPo battery
- ✅ WonderAi app (iOS/Android) · Wireless handle · ROS terminal · Keyboard — multiple control methods
- ✅ Complete STEAM curriculum: ROS, SLAM, 3D vision, OpenCV, YOLOv8, MediaPipe, ChatGPT, MoveIt, Gazebo
| Specification | Details |
|---|---|
| Controller | NVIDIA Jetson Nano 4GB — 128-core Maxwell GPU, Quad-core ARM Cortex-A57 |
| ROS Compatibility | ROS1 (Noetic on Ubuntu 18.04) + ROS2 — both system images provided |
| Deep Learning | TensorRT acceleration; TensorFlow, PyTorch, YOLO, MediaPipe |
| Chassis | Mecanum-wheel suspension chassis — 4 omnidirectional wheels, high-precision pendulum suspension |
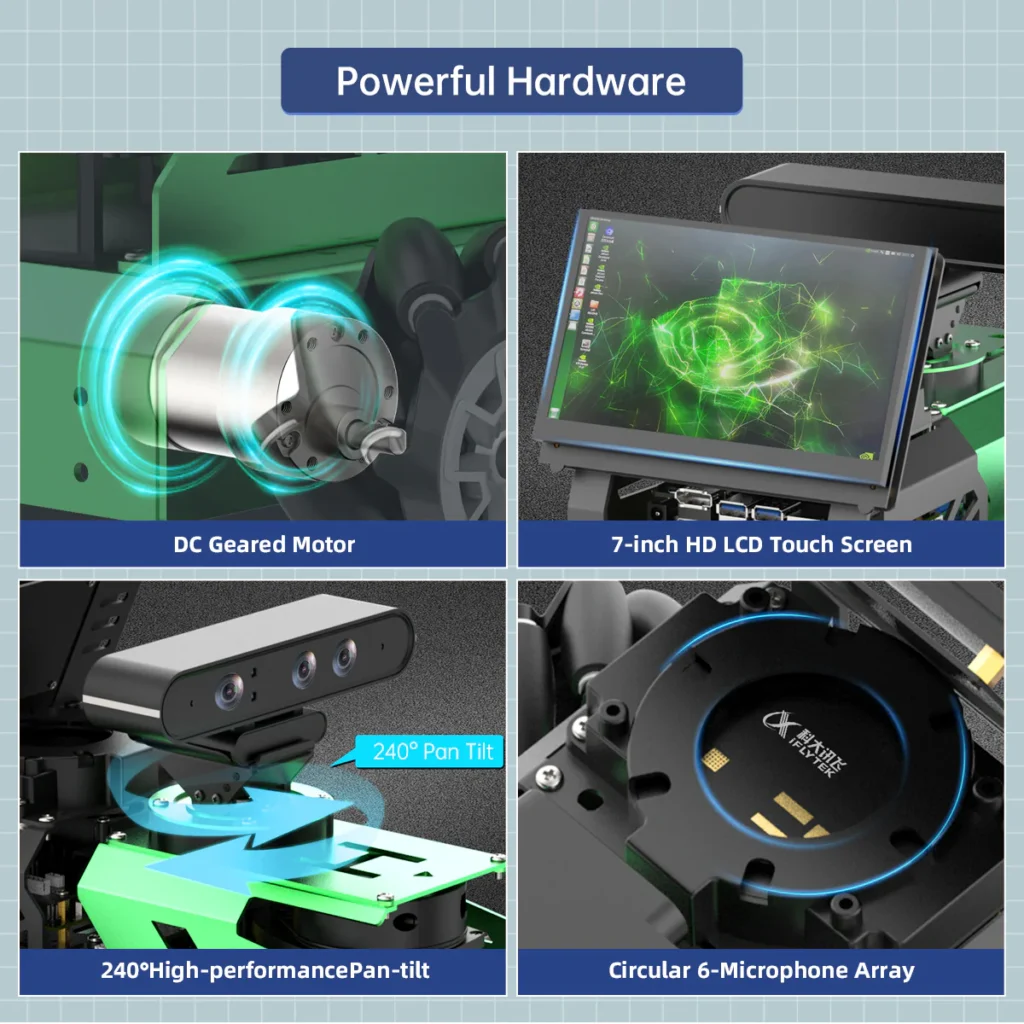
| Motors | High-performance magnetic encoder motors — closed-loop, protective end shell, extended lifespan |
| Lidar | SLAMTEC A1 360° Lidar — 2D SLAM mapping, path planning, fixed-point navigation, obstacle avoidance |
| 3D Depth Camera | 3D depth camera — point cloud images, RTAB 3D mapping navigation, depth obstacle avoidance |
| Display | 7-inch IPS touch screen (1024×600) — robot-mounted, Jetson-compatible |
| SLAM Algorithms | Gmapping, Hector, Karto, Cartographer, RRT — 5 algorithms; TEB path planning; dynamic obstacle avoidance |
| AI Vision | OpenCV, YOLOv8, MediaPipe — color recognition, object tracking, face detection, gesture, somatosensory |
| Large AI Model | ChatGPT multimodal integration — 3D vision + voice interaction; scene understanding; autonomous task execution |
| Pan-Tilt | 2DOF rotatable camera pan-tilt for wide-angle tracking and FPV |
| Battery | 11.1V 6000mAh LiPo — overcharge, over-discharge, short-circuit protection; ~3 hour charge |
| Control | WonderAi app (iOS/Android); wireless handle; ROS terminal; keyboard |
| Tutorials | ROS dev, SLAM, 3D vision, OpenCV, YOLOv8, MediaPipe, ChatGPT, MoveIt, Gazebo simulation — video + text |
NVIDIA Jetson Nano with ROS1 & ROS2 Support
JetAuto is a high-performance educational robot developed for ROS learning scenarios. Equipped with Jetson Nano/Orin Nano/Orin NX controllers and compatible with both ROS1 and ROS2,JetAuto integrates deep learning frameworks with TensorRT acceleration, making it ideal for advanced AI applications such as SLAM and vision recognition.
With 4 omnidirectional Mecanum wheels, JetAuto robot car can move 360°. Different movement modes (move forward, horizontally, diagonally, and rotate) and excellent performance make it bold to challenge various complicated routes. JetAuto demonstrates superior adaptability to uneven terrain — the high-precision pendulum suspension structure balances the force exerted on all four wheels, effectively minimizing navigation errors and enhancing SLAM application development.
5 SLAM Algorithms + RTAB 3D Mapping Navigation
JetAuto is equipped with a powerful combination of a 3D depth camera and Lidar. It utilizes a wide range of advanced algorithms including Gmapping, Hector, Karto, Cartographer, and RRT, enabling precise multi-point navigation, TEB path planning, and dynamic obstacle avoidance. Using 3D vision, JetAuto can capture point cloud images of the environment to achieve RTAB 3D mapping navigation.
With its built-in Lidar, JetAuto performs SLAM mapping and navigation while supporting path planning, fixed-point navigation, and dynamic obstacle avoidance. The RRT (Rapidly-exploring Random Tree) autonomous exploration algorithm enables JetAuto to autonomously map an unknown environment and return to its starting position — entirely without manual control. The 3D depth camera further enables depth image data processing and advanced 3D visual mapping beyond standard 2D Lidar SLAM.
- Gmapping, Hector, Karto, Cartographer — 4 classic 2D SLAM algorithms
- RRT — autonomous exploration and return-to-start
- TEB path planning for dynamic trajectory optimization
- RTAB 3D mapping using depth camera point cloud
- Real-time dynamic obstacle avoidance during navigation
ChatGPT Multimodal AI — Human-Robot Interaction Redefined
JetAuto AI Robot deploys multimodal models with ChatGPT at its core, integrating 3D vision and a 6-microphone array. This synergy enhances its perception, reasoning, and actuation capabilities, enabling advanced embodied AI applications and delivering natural, context-aware human-robot interaction.
JetAuto's AI vision system employs OpenCV for image processing, KCF target tracking, YOLO object detection, and MediaPipe for human body recognition, face detection, and gesture control. Somatosensory control allows the robot to mirror body movements. The rotatable pan-tilt camera enables full-range FPV streaming and active target tracking while the robot is in motion.

Comprehensive ROS Curriculum from Fundamentals to Advanced AI
JetAuto's structured curriculum provides mastery of cutting-edge technologies including ROS development, SLAM mapping and navigation, 3D depth vision, OpenCV, YOLO, MediaPipe, Large AI model integration, MoveIt, and Gazebo simulation. Supported by extensive documentation and video tutorials, JetAuto's progressive learning system breaks down complex concepts into digestible modules — guiding you from fundamentals to advanced implementations and empowering you to build your own intelligent robotic systems.
JetAuto provides multiple control methods including the WonderAi app (iOS and Android), wireless handle, Robot Operating System (ROS), and keyboard. By importing corresponding codes, you can command JetAuto to perform specific actions. All source code is open-source Python with detailed annotations, and the tutorials cover the complete ROS development lifecycle from environment setup to advanced autonomous navigation deployment.
ChatGPT at the Core — 6-Microphone Array & 3D Vision Fusion
JetAuto AI Robot deploys multimodal models with ChatGPT at its core, integrating 3D vision and a 6-microphone array. This synergy enhances its perception, reasoning, and actuation capabilities, enabling advanced embodied AI applications and delivering natural, context-aware human-robot interaction. The 6-microphone array provides far-field sound source localization, voice recognition, and voice interaction — the robot knows where a voice is coming from and responds intelligently.
JetAuto's AI vision system employs OpenCV for image processing, KCF target tracking, YOLO object detection (YOLOv8), and MediaPipe for human body recognition, face detection, and gesture control. Somatosensory control allows the robot to mirror human body movements in real time. The rotatable 2DOF pan-tilt camera enables full-range FPV streaming and active target tracking while the robot is in motion — maintaining lock on a target as the robot navigates autonomously.
- ChatGPT multimodal AI — natural language → scene understanding → autonomous task execution
- 6-microphone array — far-field sound source localization and voice recognition
- 3D vision fusion: depth camera + Lidar + AI models for comprehensive environment perception
- YOLOv8 object detection — identify and classify objects in real time
- MediaPipe: human body recognition, face detection, gesture control, somatosensory mirroring
- KCF target tracking — maintain lock on moving targets while navigating
- 2DOF pan-tilt camera — active tracking FPV during autonomous movement
From ROS Fundamentals to Advanced AI — Complete Tutorial System
JetAuto's structured curriculum provides mastery of cutting-edge technologies including ROS development, SLAM mapping and navigation, 3D depth vision, OpenCV, YOLO, MediaPipe, Large AI model integration, MoveIt, and Gazebo simulation. Supported by extensive documentation and video tutorials, JetAuto's progressive learning system breaks down complex concepts into digestible modules — guiding you from fundamentals to advanced implementations and empowering you to build your own intelligent robotic systems.
JetAuto tutorial resources include schematics, source codes, videos, and experimental projects. All you need for STEAM education is right here. The curriculum is structured progressively: starting from getting started guides and basic motion control, advancing through SLAM mapping and autonomous navigation, to advanced deep learning projects with YOLOv8, ChatGPT multimodal integration, and voice interaction. All source code is open-source Python with detailed annotations.
- ROS development fundamentals — Linux, ROS setup, package creation, node programming
- SLAM mapping and navigation — Gmapping, Cartographer, RRT, multi-point navigation, TEB path planning
- 3D depth vision — point cloud processing, RTAB 3D mapping, depth obstacle avoidance
- OpenCV — color recognition, KCF tracking, autonomous driving, line following
- YOLOv8 — object detection and classification with TensorRT acceleration on Jetson Nano
- MediaPipe — human body recognition, gesture control, face detection, somatosensory interaction
- Large AI model integration — ChatGPT multimodal with 3D vision + 6-mic voice interaction
- MoveIt simulation · Gazebo simulation — virtual testing before physical deployment
JetAuto — AI ROS Robot Car with NVIDIA Jetson Nano 4GB
Does JetAuto support both ROS1 and ROS2?
What SLAM algorithms are supported on JetAuto?
What deep learning frameworks and AI capabilities are supported?
What is the suspension chassis and why does it matter for SLAM?
How do I control JetAuto and what tutorials are included?
The full sheet
Related products
-
·XBM·00


-
·XBM·01


-
·XBM·02
 JIYI WATER FLOW SENSOR FOR AGRICULTURE DRONEOriginal price was: ₹2,118.₹1,549Current price is: ₹1,549. (Excl. GST)Add to cart
JIYI WATER FLOW SENSOR FOR AGRICULTURE DRONEOriginal price was: ₹2,118.₹1,549Current price is: ₹1,549. (Excl. GST)Add to cart -
·XBM·03



There are no reviews yet.