



ROSPug – Quadruped Bionic Robot Dog
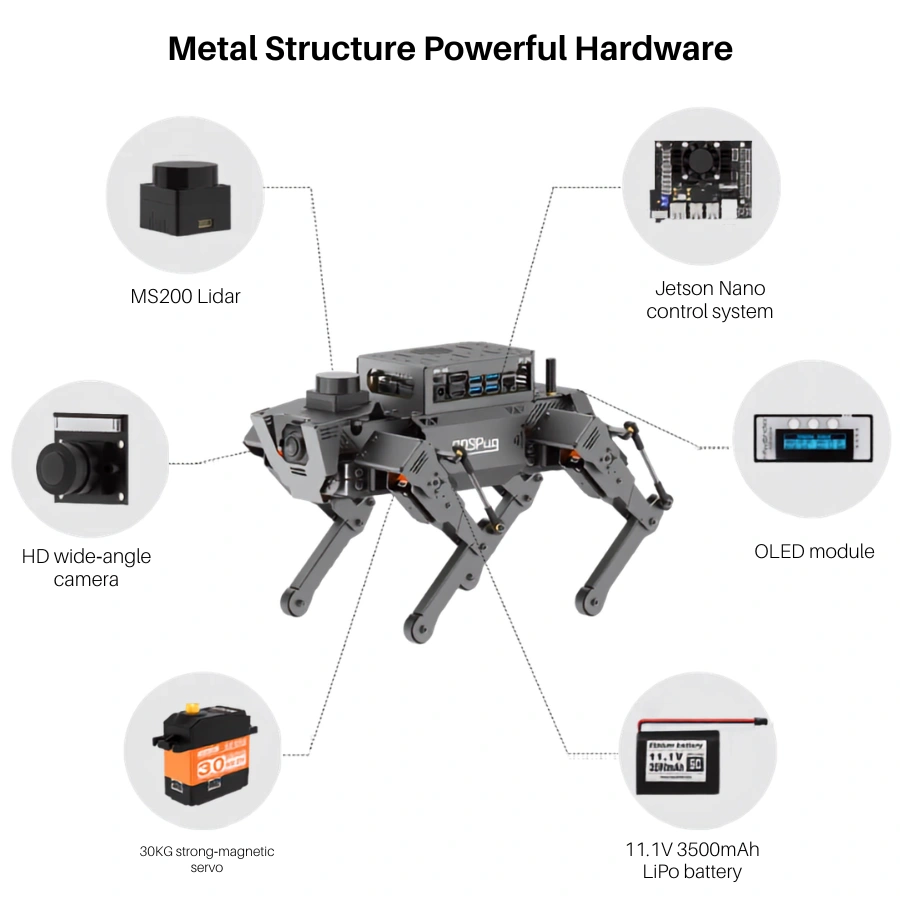
- NVIDIA Jetson Nano + Dual-Controller Design – Combines Jetson Nano AI computing with a high-frequency MCU for real-time precision gait control and complex AI challenge execution.
- 12 High-Voltage Strong-Magnetic Serial Bus Servos (30KG) – Distributed across elbow, shoulder, and hip joints; aluminum alloy body with metal-bearing-reinforced calf joints for lightweight, high-strength bionic movement.
- TOF Lidar + HD Wide-Angle Camera – Enables SLAM mapping navigation, path planning, dynamic obstacle avoidance, target tracking, and first-person-view (FPV) streaming via app.
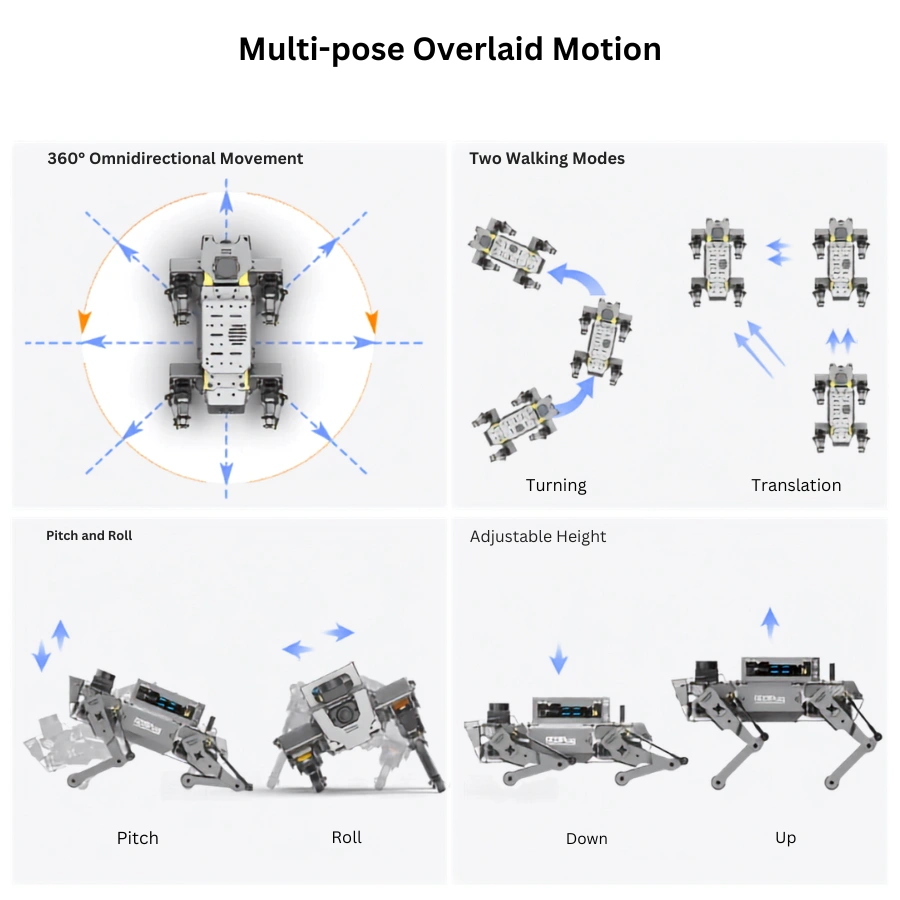
- Self-Developed Dynamic Balancing Kinematics – Supports ripple and trot gaits with real-time IMU-based posture correction, self-balancing, and yaw-angle correction on any incline.
- Rich AI Vision Applications – Color recognition, line following, face detection, ball shooting, emotion recognition, MediaPipe body and gesture recognition, and April Tag tracking.
- Multi-Control & Open-Source – WonderROS app (iOS/Android), PC software with drag-and-drop action editor, wireless PS2 handle, and Gazebo simulation; full Python open-source code provided.
- 3 months · ₹47,995
- 6 months · ₹23,998
- 9 months · ₹15,999
Select Snapmint at checkout · Available on orders above ₹3,000 · Subject to eligibility
- Trusted dealerDirect manufacturer partnership
- Pan-India deliveryInsured shipping, all states
- Post-sale supportTraining + service included
What makes it work
ROSPug
Quadruped Bionic Robot Dog
ROSPug is a smart quadruped robot dog built upon the Robot Operating System (ROS). It is equipped with 12 high-voltage strong-magnetic serial bus servos and integrates high-performance components including NVIDIA Jetson Nano, TOF Lidar, HD camera, IMU sensor, and OLED display. Featuring a self-developed dynamic balancing kinematics algorithm, it switches seamlessly between multiple gaits. ROSPug supports Gazebo simulation, provides users a valuable platform to learn and validate quadruped kinematics algorithms and path planning, and can perform SLAM mapping navigation, dynamic obstacle avoidance, climbing, and obstacle bypassing.
| Specification | Details |
|---|---|
| Controller | NVIDIA Jetson Nano (dual-controller: Jetson Nano for AI + MCU for high-frequency servo control) |
| Servos | 12 high-voltage strong-magnetic serial bus servos, 30KG torque — elbow, shoulder, hip joints per leg |
| Body | Full aluminum alloy; metal-bearing-reinforced calf joints; link structure leg design |
| Sensors | TOF Lidar, HD wide-angle camera, IMU sensor (6-axis), OLED display |
| Framework | ROS — Ubuntu 18.04, ROS Melodic; Gazebo simulation support |
| SLAM | SLAM mapping, TEB path planning, dynamic obstacle avoidance, autonomous navigation |
| Gaits | Ripple Gait, Trot Gait — dynamic switching via self-developed algorithm |
| AI Vision | Color recognition, line following, face detection, ball shooting, emotion recognition, MediaPipe, April Tag, circular drift |
| Control | WonderROS app (iOS/Android), graphical PC software (drag-and-drop), wireless PS2 handle |
| Simulation | Gazebo simulation; ROS kinematics validation; quadruped IK analysis tool |
| Programming | Python — fully open-source with detailed annotations; IK source code included |
| Battery | 11.1V high-voltage LiPo |
| OS | Ubuntu 18.04 + ROS Melodic |

12 High-Voltage Servos with Aluminum Alloy Body
ROSPug employs 12 high-performance servos distributed across its elbow, shoulder, and hip joints of each leg, closely mimicking the posture of a real quadruped animal. Its entire body is crafted from aluminum alloy, with the calf joint reinforced by metal bearings, ensuring both low weight and high strength.
ROSPug features a link structure design that enhances the speed of the calf joint and ensures smooth motion without interference, thereby extending the leg's rotation range. The 12 intelligent serial bus servos provide 30KG torque with exceptional accuracy, data feedback, easy wiring, and support for a robust 12V voltage power supply.
The dual-controller design combines the advanced AI computing capability of the Jetson Nano with the high-frequency control functions of the MCU. This integration enhances operational accuracy, enabling the system to tackle more complex challenges and explore a wider range of creative AI applications.
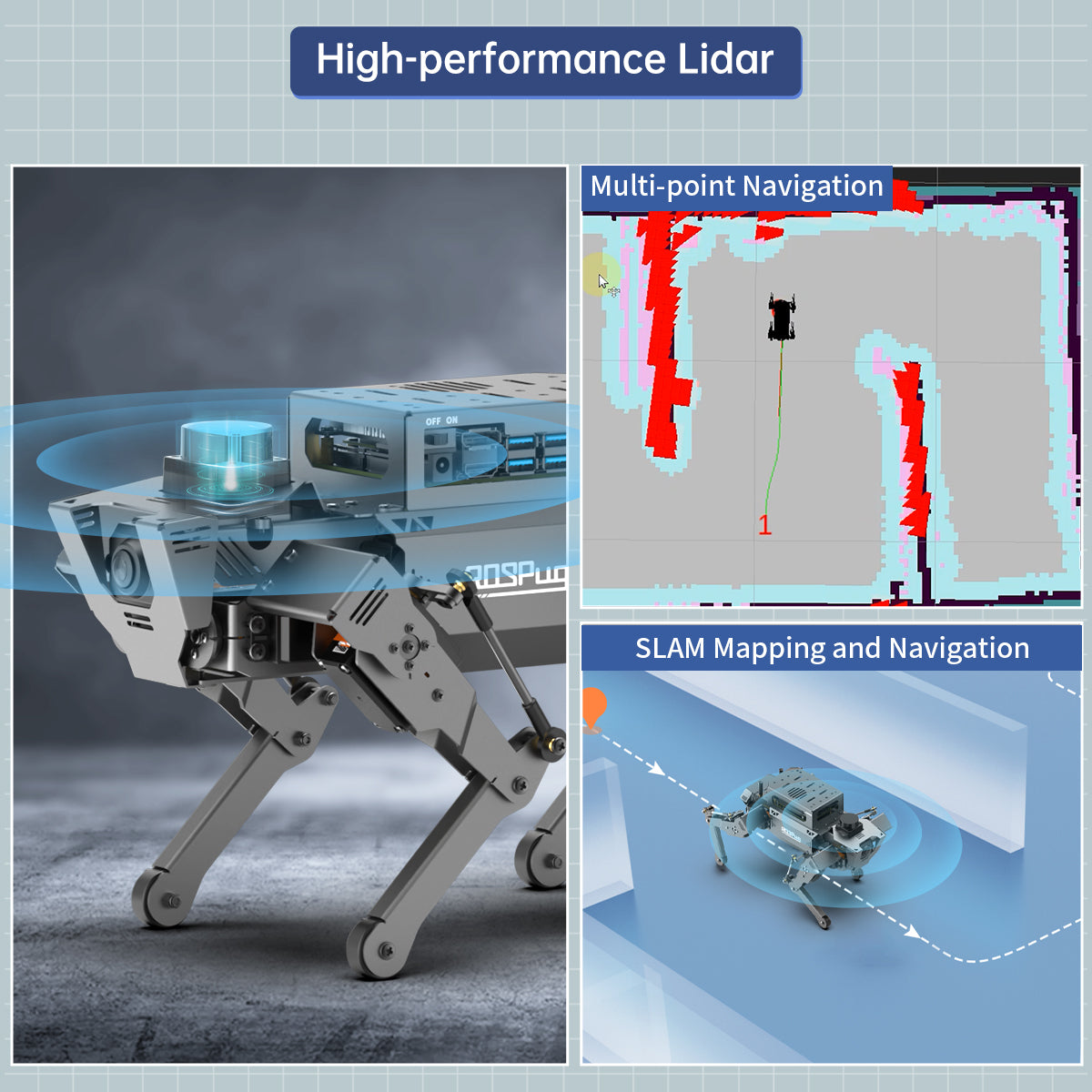
Lidar SLAM Mapping, Path Planning & Obstacle Avoidance
ROSPug AI robot dog is powered by Jetson Nano and features high-performance TOF Lidar and an HD wide-angle camera, enabling the validation of various creative AI applications. The Lidar enables ROSPug to perform SLAM mapping and navigation, supporting path planning, fixed-point navigation, and dynamic obstacle avoidance.
ROSPug can perform tasks such as SLAM mapping navigation, path planning, dynamic obstacle avoidance, climbing, obstacle bypassing, and many other applications. ROSPug's capabilities, including deep learning, machine vision, and other secondary development projects to meet users' specific research needs.

Color Tracking, Face Detection & MediaPipe Control
ROSPug is equipped with an HD wide-angle camera and utilizes the OpenCV library for efficient image processing, enabling a diverse range of AI applications including target recognition, localization, line following, obstacle avoidance, face detection, ball shooting, color tracking, and April Tag recognition.
ROSPug can recognize color lines and calculate the location of the line so as to adjust its walking gait and realize line following. Using independent visual judgment, ROSPug can identify the position and height of stairs and autonomously navigate up and down — and the IMU sensor enables real-time posture correction to maintain balance on inclined surfaces.
- Color recognition and tracking — perform different actions per color
- Autonomous stair climbing via visual judgment
- MediaPipe gesture and body recognition
- April Tag detection and coordinate recognition
- Ball shooting and circular drift using Lidar + vision

Graphical PC Software, App Control & Gazebo Simulation
Using the graphical PC software, you can effortlessly control servos and customize actions by simply dragging sliders — without the need for programming. All intelligent Python code is open source with detailed annotations for easy self-study. This is provides detailed quadruped kinematics analysis, ROS-based inverse kinematics functions, and parameter debugging software.
ROSPug employs the ROS framework and supports Gazebo simulation, providing users a valuable platform to validate quadruped kinematics algorithms and path planning in a virtual environment without physical hardware requirements. The WonderROS app (iOS/Android) enables remote robot control and live FPV camera viewing.



ROSPug — ROS Quadruped Robot Dog Specifications
What makes ROSPug's dual-controller design special?
What gaits does ROSPug support and can I customize them?
Can ROSPug climb stairs autonomously?
What AI vision features are built in?
Is Gazebo simulation supported for development?
The full sheet
Related products
-
·XBM·00


-
·XBM·01


-
·XBM·02


-
·XBM·03
 JIYI WATER FLOW SENSOR FOR AGRICULTURE DRONEOriginal price was: ₹2,118.₹1,549Current price is: ₹1,549. (Excl. GST)Add to cart
JIYI WATER FLOW SENSOR FOR AGRICULTURE DRONEOriginal price was: ₹2,118.₹1,549Current price is: ₹1,549. (Excl. GST)Add to cart

There are no reviews yet.